When I started using my Losmandy G11 mount it used an digital drive system. Autoguiding was accomplished with the SBIG relay box. At first I had some errors with the tracking and I deceided to use pempro to find the source of the problem.

After some runs with pempro I found out that I had a weird error histogram:

Okay, so I deceided to do a Fourrier Analysis to find the frequencies where I had the most errors and I became this frequency spectrum:
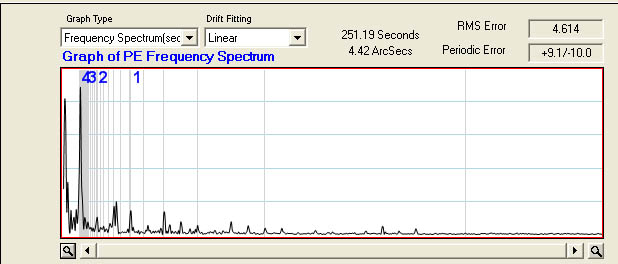
This means that my mount suffered from highfrequency errors.
I tried to let go of the digital drive system and installed a boxdoerfer mts3sdi controller on the motors. After that I made a PE curve...
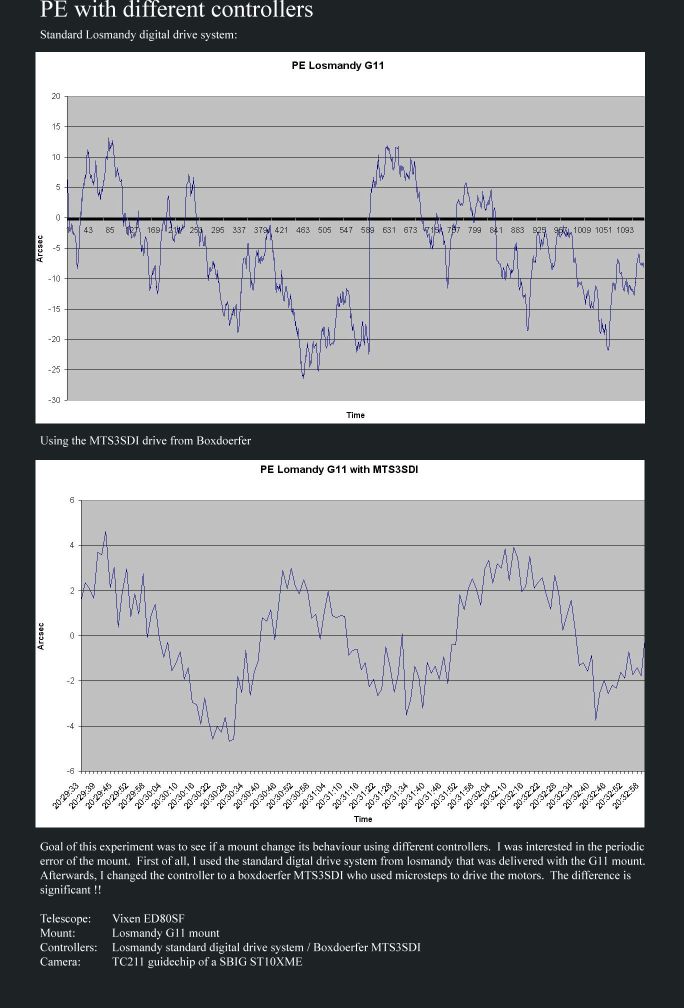
WOW! The difference is stunning! I still had some problems with the RA-tracking but that was caused by a screw in the in the oldham coupler that was loose.