

Copyright © All rights reserved. Made By Erik Bryssinck Terms of use | Privacy policy









Migration from Uniwersal DomeDriver to LesveDomeNet solution

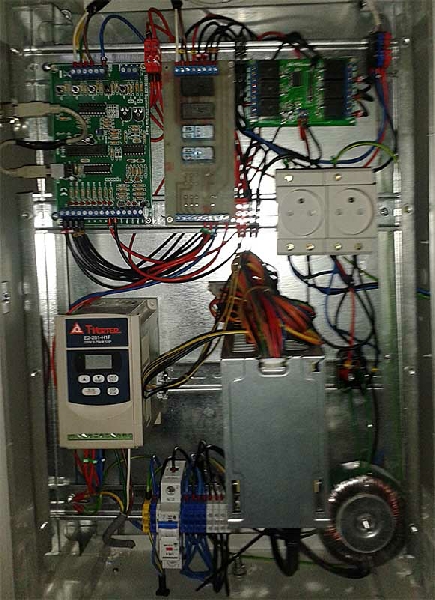
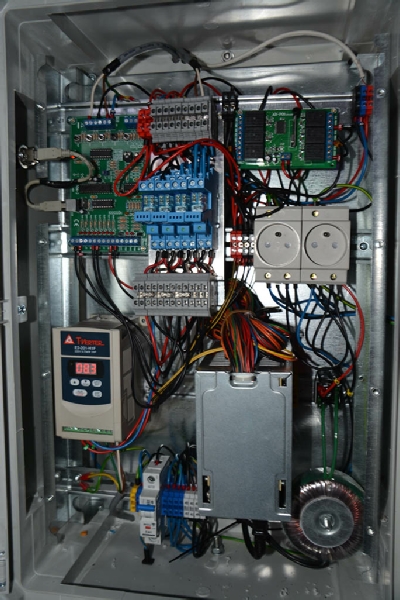
Original control box of Uniwersal
Box after the migration to LesveDomeNet with relays
After about 3 months of installing the Uniwersaldome I had many problems with the software, especially the accuracy of following the GEM, in my case my 10Micron GM2000 Qci. The function for manual control is working fine, here is no problem. I had reported this to the Uniwersal Company and the programmer of the software sent me a new version almost every week to test, there was a small improvement, unfortunately for the west side of the meridian it was always wrong. Since I have been working on this for almost 3 months, without a properly working software, I have decided to look for a good working solution. I then came to the Belgian LesveDomeNet solution from Pierre de Ponthierre. Big advantage for the LesveDome Solution is the ASCOM driver which I don’t have with the Uniwersal DomeDriver. There is also a Yahoogroup for LesveDomeNet
It was not an easy task, because I don’t have documentation or drawing of the steering of Uniwersal, it was not available from Uniwersal. So I started first with kind of backward engineering and I made first a drawing of the steering of the Uniwersal Dome. So, I had now a good overview how the electronics/relay and so on was working and builded. This schematic drawing is for my dome and is version 4. So other owners must be carefully with this, they must check of this drawing is the same !
After a study of the operation and thorough carefully read and study of website from LesveDomeNet, and with the help of a colleague amateur astronomer who uses this software, I have been able to create a new schematic for the control. Ultimately, the control only needs to be partially modified, as the LesveDomeNet also uses the Velleman K8055N card.
Here I want to publish what I have done so other possible Uniwersal dome users can migrate to the LesveDomeNet solution if they want.
Here below, you can see the difference in wiring of the in-
|
function |
Uniwersal Input |
Uniwersal Output |
LesveDomeNet input |
LesveDomeNet output |
|
azimuth sensor |
1 |
|
1 |
|
|
Home switch |
3 |
|
2 |
|
|
Direction Azimuth |
2 |
|
4 |
|
|
shutter OPEN |
4 |
|
|
|
|
shutter CLOSE |
5 |
|
|
|
|
OPEN shutter |
|
3 |
|
5 |
|
CLOSE shutter |
|
4 |
|
6 |
|
AZIMUTH CW |
|
1 |
|
1 |
|
AZIMUTH CCW |
|
2 |
|
2 |
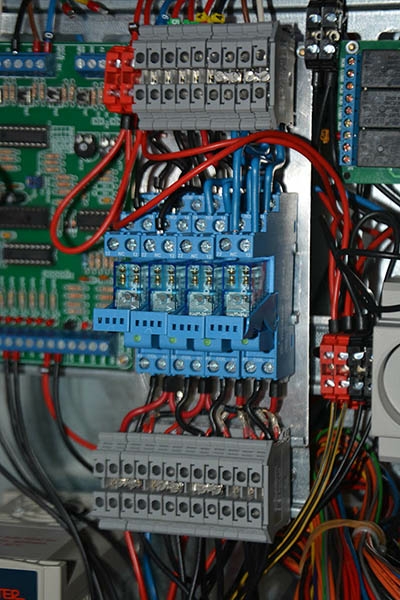
Detail of the 4 relays